QUERY · ISSUE
Document values of CAN bus Constants
docs
Hi,
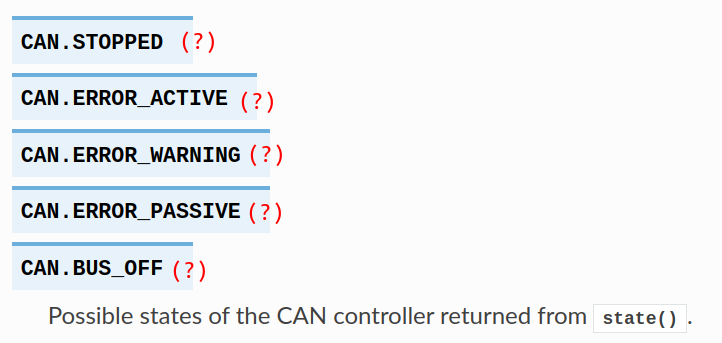
Since CAN.send() have no error code returned, I've to check CAN.state() and got 4. But what 4 stand for? Then I've to search code to figure out this error code.
So, it's very convenient if values of CAN bus Constants can be documented clearly.
CANDIDATE · ISSUE
PyBoard CAN doesn't work?
When trying following code:
from pyb import CAN
can1 = CAN(1, CAN.NORMAL)
can2 = CAN(2, CAN.NORMAL)
can1.setfilter(0, CAN.LIST16, 0, (123, 124, 125, 126))
can2.setfilter(0, CAN.LIST16, 0, (123, 124, 125, 126))
can1.send('magic', 123)
can2.recv(0)
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
OSError: [Errno 110] ETIMEDOUT
and after many send() calls I'm getting
OSError 16 which is device or resource busy.
I've tried to connect Y3-Y6 and Y4-Y5 (CAN1 - CAN2) directly. I've tried to connect with the following scheme of two transceivers: https://easyeda.com/kamikaze/CAN_bus_shield_for_PyBoard_v1_1-CusOLJ53N
for me it seems that something is wrong with the code, board or micropython... please help me to figure out )